
国内首个“星际矿工”诞生啦,就在徐州!
今年全国两会上,习近平总书记在参加江苏代表团审议时再次发表重要讲话,深刻阐明经济大省挑大梁必须把握好四个着力点,其中第一个就是“在推动科技创新和产业创新融合上打头阵”。
科技创新和产业创新,是发展新质生产力的基本路径。抓住了创新,就抓住了牵动经济社会发展全局的“牛鼻子”。徐州上下深刻领会把握“在推动科技创新和产业创新融合上打头阵”这个置于首位的着力点,推动科技创新和产业创新深度融合,不断塑造高质量发展新动能新优势。
即日起,徐州广电推出系列报道《彭派新动力:解码AI新势力》,看他们如何以技术为笔、场景为墨,描绘出“AI+产业”的徐州新图景。
太空采矿?
听起来很科幻
如今真的可以实现了
全国首台“星际矿工”诞生啦
就在中国矿业大学
中国矿业大学刘新华教授团队研发的多功能太空采矿机器人,与时下火爆的人形机器人以及机器狗等不同,太空采矿机器人的基本形态为六足模式,有三个轮足和三个爪足。 材料选择方面,这款太空采矿机器人的主体结构采用了新型铝基碳化硅复合材料,车轮基座采用钛合金材料,车轮轮体则采用镍基钛记忆合金材料。这些材料不仅具有高强度、高韧性和高稳定性的特点,还能在受到外力作用后迅速恢复原状,能有效抵御太空中的极端温差和辐射环境。 更为巧妙的是,该机器人还配备了一套差动系统。通过悬架、离合器、差动器和张角调节器的协同工作,机器人可以根据工作环境调整移动模块的结构形状。无论是崎岖不平的月球表面,还是布满陨石坑的小行星地表,这款机器人都能保持平稳运行,展现出极高的环境适应性。 “训练场”主要是将月球的原位环境模拟出来—— 六分之一G重力场,超高真空的环境; 月球上白天可以达到130℃的高温,晚上可以达到-180℃,甚至在极区可以达到-250℃的低温; 实现对月球小重力场等极端环境的长时间、高精度模拟。 经过在沙盘上不断训练,目前,通过六足差动系统悬架、离合器等协同工作,太空采矿机器人已经可以根据工作环境调整自身结构形状,适应地外星体的复杂地表环境。 “我们研究团队最大的优势就是年轻活力,但我们深知,项目虽然已经取得一定成果,但对于太空采矿技术的长远发展来讲,也仅局限于基础理念,具体方案可行性验证、材料技术匹配支持等还有很长的路要走。 习近平总书记曾勉励我们‘梦虽遥,追则能达;愿虽艰,持则可圆’,我们将不断努力,在学校的大力支持下,在团队的团结协作下,为真正实现太空采矿而赓续奋斗。”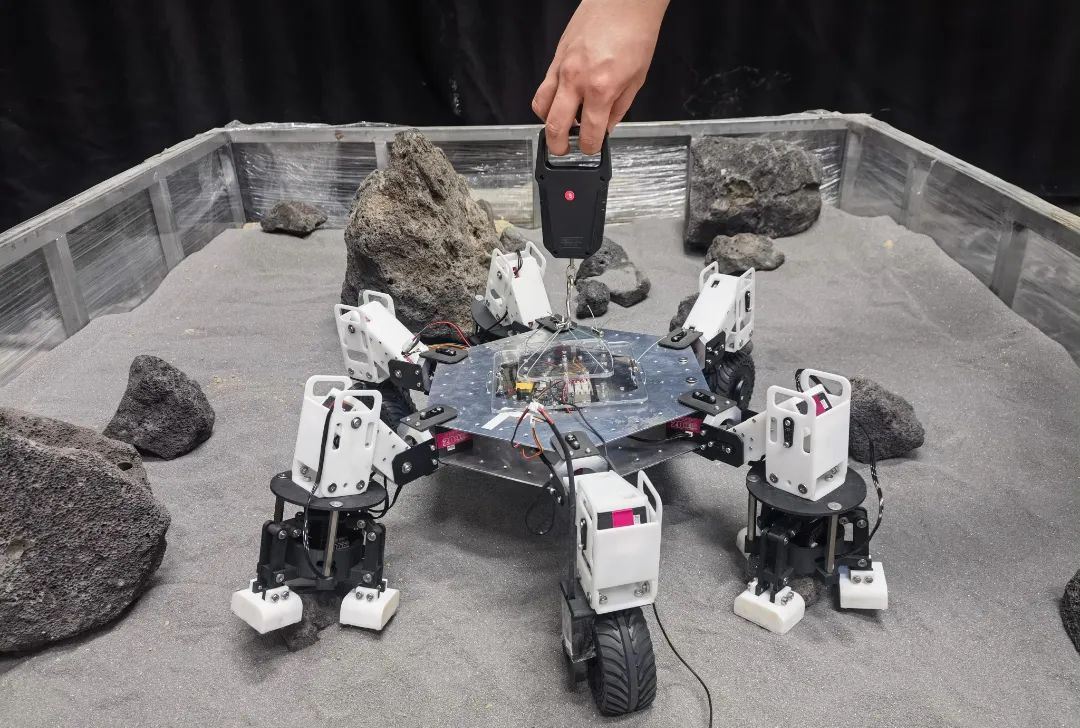




研发初期,面对“星际矿工”零参考的困境,团队根据课题背景分析需求,另辟蹊径、综合考量,构建了“导师领航-博士攻坚-研究生主攻-本科生筑基”金字塔模式研究框架,创新性地参考了节肢昆虫和啄木鸟的攀附运动原理,为后续研究解决了特殊环境下机器人的移动问题和采样时承受的冲击力问题。
专家介绍,基于现有的空间科学技术、航空航天技术以及采矿技术等,人类有望在几十年内实现试验性开采近地星体上的太空资源。
月球作为地球唯一的天然卫星,同时具有距地球相对较近的优势和丰富的资源,目前对月球资源的探索研究全球关注度最高,科研投入也最大。
“向外太空发展是人类社会未来发展非常重要的一个阶段,是人类文明发展非常重要的一个阶段。 去外星球发展,第一步就是解决资源的问题。这就是国家包括我们做研究时,聚焦的重点就是太空采矿,或者说将月球资源的原位开采利用放在首位的原因。”
当 “星际矿工” 终有一天
在太空上采集资源
我们会记得
它的每一步跨越
都始于彭城这片充满创新基因的热土


